减速器是人形机器人旋转关节核心部件,通过降速增矩保证机器人运动控制的高精度与稳定性。人形机器人关节模组精密减速器主要是谐波减速器、RV减速器和行星减速器。1)谐波减速器由带有内齿圈的刚性齿轮(刚轮)、带有外齿圈的柔性齿轮(柔轮)、波发生器三个基本构件组成。
谐波减速器具备单级传动比高、传动精度高、体积小、结构简单紧凑等特点。在人形机器人中,主要应用于机器人小臂、腕部或手部。在特斯拉人形机器人Optimus中,谐波减速器是旋转执行器的核心零部件。2)RV减速器分为第一级行星减速机构和第二级摆线针轮减速机构两部分,由输入齿轮(太阳轮)、正齿轮(行星轮)、RV齿轮、曲轴、针齿销、外壳、输出轴等组成。
RV减速器具备高精度、高刚性、高耐久性等特点,能够为承重关节提供稳定而可靠的动力支持,主要应用于机器人的腰部、腿部等承重关节部位。3)行星减速器主要由内齿轮(行星架)、太阳齿轮、行星齿轮,输出法兰等组成。
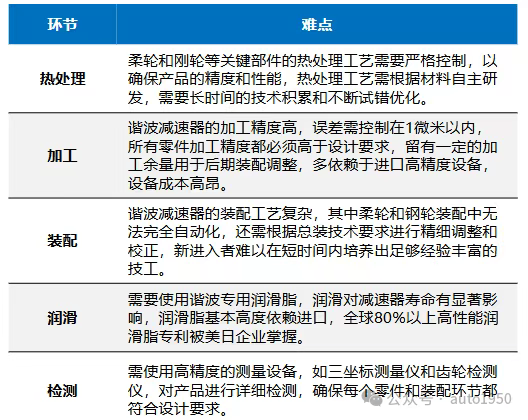
精密行星减速器具有体积小、重量轻、高扭矩等特点,在采用准直驱方案的人形机器人旋转执行器中,得到较为广泛的应用。谐波减速器关键性能指标为使用寿命、传动精度、传动效率、刚度、升温、噪声等。谐波减速器的制造具备较高的技术壁垒,核心难点在于材料制备、齿形设计和生产工艺。1)材料制备:柔性轴承需用超纯净钢冶炼技术。柔轮+柔性轴承需要承受周期性的变形,对材料的疲劳强度和纯净度要求极高。柔轮和柔性轴承材料目前多为40Cr合金钢,但国内提纯技术不足,导致材料杂质较多,影响产品的疲劳寿命。2)齿形设计:新进齿形专利限制。齿形的精度直接影响传动效率和寿命,传统齿形设计如渐开线齿形和双圆弧齿形存在一定的局限性,而先进的齿形设计(如哈默纳科的“IH”齿形)被国外企业垄断,新进入者难以绕开专利限制。3)生产工艺:齿形磨削工艺达到微米级。谐波减速器的加工精度高,误差需控制在1μm,多依赖于进口高精度设备,设备成本高昂,工艺需长期的经验积累。此外,谐波减速器的装配工艺复杂,其中柔轮和钢轮装配中无法完全自动化,还需根据总装技术要求进行精细调整和校正,新进入者难以在短时间内培养出足够经验丰富的技工。
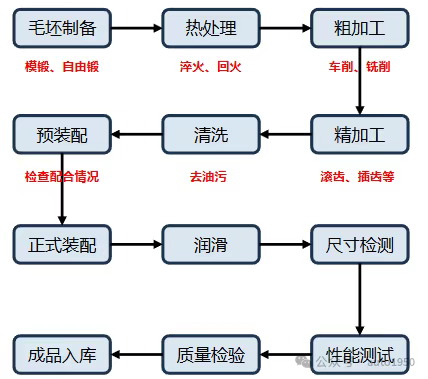
谐波减速器的生产技术壁垒较高,瓶颈分布于热处理、加工、装配、润滑、检测等。•热处理:高精度齿轮成型的核心,决定齿轮的硬度和耐磨性,需根据材料自主研发,需要长时间的技术积累和不断试错优化;•机加工:车削、滚齿/插齿,加工精度要求高,工艺效率有待提升,多依赖于进口设备,交付期约为8-12个月;•装配:工艺复杂,装配中无法完全自动化,还需要精细调整和校正,需要足够经验丰富的技工;•润滑:润滑脂高度依赖进口,其对寿命有显著影响,核心专利被美日企业垄断;•检测:检测需使用高精度测量设备,检测零部件的尺寸精度。
在齿轮加工方面,分为慢走丝、插齿、滚齿等工艺,其中慢走丝加工精度高,但生产效率低,通常用于产品打样阶段;滚齿连续切割,生产效率高,但加工精度低,主要用于柔轮的齿形加工。插齿的生产效率和加工精度介于慢走丝和滚齿之间。
——全国齿轮标准化技术委员会(SAC/TC52)原秘书长 王志刚
——中国通用零部件工业协会齿轮与电驱动分会副会长 吕超(3)高精度齿轮制造技术的突破与应用——郑州华威齿轮的创新实践(4)PEEK材料在齿轮制造中的应用与加工技术
——南京高精齿轮集团有限公司
1.会议规模:50人。
2.观众领域:限齿轮及轴、轴承、差速器、变速器等传动件生产企业。
3.报名方式:本次会议统一通过线上报名,请大家扫描下方二维码或点此链接进行报名。报名截止时间:2025年8月20日。
4. 本次论坛免收会议费,统一安排食宿,每家企业限报3人,审核后方可参会。




' fill='%23FFFFFF'%3E%3Crect x='249' y='126' width='1' height='1'%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E)